

Archive for December, 2007
First Hardware
I bought a used Augat wire wrap board off eBay. It’s a huge 2D array of hollow gold pins, 12″ x 7″. Chips are pushed into the component side of the board, fitting the legs of the chips into the hollow pins. I believe it’s intended to be a force fit, so no soldering. On the wiring side of the board, the pins project out about 3/4″ inch, and wire wrap tools are used to string wires between them.


The board has 26 pairs of columns spaced 0.3″ apart (the width of a normal DIP chip), each column 53 pins high. Typical 7400-series chips like the ones I’m using have about 20 pins, 10 on each side. If I packed them in tight, that would give me space for about 5 chips per column pair, or 130 chips total. However, some chips like the SRAM and EPROMs are double-width 0.6″. I also plan to use ZIF sockets for the EPROMs to make it easy to swap them in and out, which will eat up even more board space. Allowing for extra space between the chips and a handful of oversized components, I should still be able to fit at least 60-70 chips on the board, which should be more than enough to accomodate my design.
Since this board is used, it has lots of wire wrapping already in place that I’ll need to remove. It also has capacitors soldered between the power and ground pins across half the board. These are marked 0747WC446 in lettering so tiny, it makes me think it’s time to get reading glasses. I’m not sure what capacitance value they are. Maybe it’s best to pull them out? I’m not sure how to find out more about them.
The board also has 3 cable connectors along one side, and a couple of tabs for popping it in/out of a backplane. I’ll probably try to remove these, to get a cleaner look. Although the cable connectors might come in handy some day, if I decide to connect peripheral devices like a disk drive…
Read 2 comments and join the conversationDesign Progress
Programming update: I wrote a simple microcode assembler, and used it to implement a dozen or so common instructions. Then I wrote a few simple programs using those instructions, to count through a loop a fixed number of times, and then branch somewhere else. Woohoo, it’s a computer! I still need to flesh out the microcode assembler a bit more, and get/write a regular program assembler. Since my instruction set is intentionally similar to the 6502, I’m looking at getting an open-source 6502 assembler, and then hacking it as needed for my purposes. Is it enough to assemble all code to an absolute address, or do I need to support the idea of relocatable code, libraries, and linking?
ALU musings:I had planned to use a 74LS181 ALU, and my Verilog model reflects this. I’m now realizing it has a couple of drawbacks. For one, its A=B output is asserted true when the result of the ALU operation is (binary) 11111111, not 00000000 as you would expect from testing equality by computing A-B. I can get around this by testing for equality by computing A-B-1 instead (the chip supports this as a single ALU op), but then I can’t use the result of other non-compare operations to see if they’re zero. For example, a handy pattern would be to sit in a loop, decrementing a counter each time, and branching back to the top of the loop if the counter isn’t zero:
LDX #04
LOOP: ; do something useful
DEX
CMP #00 ; '181 would require an explicit compare against zero here
BNE LOOP
I need to test for zero (and equality) by testing if the ALU output is 00000000, which I can do with an 8-input NOR gate, and ignore the ‘181’s A=B output. Bing! My chip count just increased by one.
I also realized I need an overflow flag from the ALU, to signal when the result of a signed addition/subtraction is outside the range -128 to +127. The regular carry flag performs a similar job for unsigned arithmetic, but is no help here. An overflow flag can be constructed from XOR-ing some of the input bits with the output and carry, but that would add even more chips to the design.
Enter the 74LS382. It’s very similar to the ‘181, but it jettisons the useless A=B output, and provides an overflow output instead. It also requires just 3 mode select input lines, compared to 5 needed by the ‘181, reducing pin count and required microcode space. It does this by providing fewer functions that it can compute, but it has all the important ones. The only useful functions on the ‘181 not supported by the ‘382 are bitwise negation (1’s complement) and left shifting. You can simulate bitwise negation by XOR-ing with 11111111, so that’s no problem. Left shifting can be accomplished by adding a number to itself, although given my design, that will require an extra clock cycle to copy the number to the temp register first. Given that I was planning to implement right shifting as 7 left shifts, then doubling the cost of left shifts is a problem. But if I can find a work around for right shifts, then I’ll switch my design to use the ‘382.
Interrupts: Bill Buzbee suggested I look at what it would take to support interrupts. I need to find a good source for explaining the theory and practice of interrupts on similar 8-bit computers, because it’s not totally clear to me how they’re intended to be used. My possibly broken understanding is that an external interrupt signal prevents the CPU from loading the next program instruction. Instead, it checks an interrupt vector for the address of an interrupt handler to run. Presumably the vector is stored in RAM rather than ROM, so application programs can install their own interrupt handlers. The interrupt handler would do, um… something about the interrupt. Finally, control would return back to the original program at the point where it left off.
I think this implies that the interrupt handler saves the current state of the registers and condition codes, and restores them when done. This could be a problem, since my design lacks any way to set the condition codes directly. It also implies a way of preventing another interrupt from happening while in the middle of processing the first interrupt. And it implies a way of signaling that the interrupt handler is done.
I guess the whole process could be viewed as a forced subroutine call. It wouldn’t be hard to create a machine instruction that does something similar to JSR, but with indirect addressing, and an implied address. The tricky part would be inserting this instruction into a running program in response to the interrupt signal. Maybe a mux on the input to the OP register, and use the interrupt line to select between the memory data bus and a hardwired IRQ opcode?
Be the first to comment!First Simulation
It simulates! I completed the Verilog description of the machine, and after fixing one place where I’d used an active high instead of an active low enable single, it worked like a champ. I implemented the microcode for NOP, JMP (absolute), and HALT. I was able to run this simple program from ROM: NOP
LOOP: NOP
JMP LOOP
Of course I don’t actually have an assembler or any other software tools, so I couldn’t write the program symbolically like this. My test program is just a bunch of hex numbers entered by hand into a text file. That’s marginally tolerable for a 5-byte assembly program, but writing microcode that way gets old very, very quickly. Each line of microcode is 24 bits wide, and keeping track of what every bit means in my head, for every line of microcode in even a simple instruction like JMP, is near impossible. I need to write a quick-and-dirty microcode assembler before I go any further.
Here’s a simulation trace of the machine booting up and executing the above program.
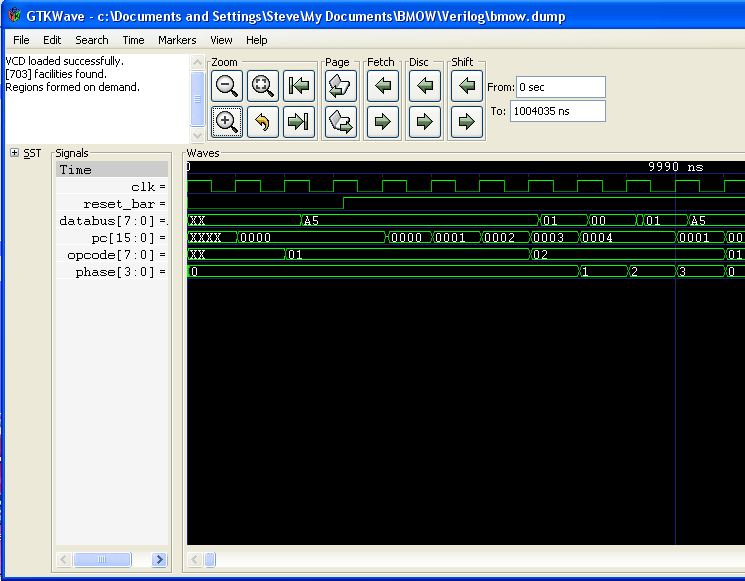
I used the awesome free tools Icarus Verilog for compiling and simultating, and GTK Wave for analyzing the waveform results. I put basic timing information into the hardware model as I was constructing it, using Verilog delays to make outputs lag inputs by the worst-case propagation delay cited in the datasheet. Theoretically, I should be able to use this to determine a lower-bound on the machine’s clock speed: just crank up the simulated clock speed until it stops working.
While completing the Verilog description of the machine, I found that I needed more “glue logic” chips for computing simple boolean functions than I’d like. Decoding memory addresses to enable the appropriate memory-mapped hardware required three different chips, and I needed several more to help with hardware initialization signals during reset. I ended up needing at least one each of NAND, NOR, AND, and OR. If I were more clever, I think there’s a lot of opportunity to clean up this logic and reduce the required chip count. Maybe I should look at using a PAL (or PLA? are they the same thing?) to compute all my simple boolean functions on a single chip, although it might be a lot slower.
I had an idea for a way to add a Y register to the machine, with just two more chips: a ‘377 register and a ‘244 driver. The obvious place to add it as at the right ALU bus, where there are presently only 3 inputs, but the control ROM encoding allows for 4. The problem is that the control ROM only allows for 8 “load destinations”: A, X, T, PCLO, PCHI, ARLO, ARHI, MEM. My idea was that I could have ARLO chain-load from ARHI instead of from the data bus, with just a single load enable signal instead of separate lo/hi enables. That would free up space for a Y load enable. Of course it would mean the machine could never load ARLO and ARHI independently: it would always have to load them one after another, first ARLO, then ARHI. I’m not sure if that’s practical, and I suspect it may not be, at least not without a performance penalty.
Construction update: I’ve started looking further into how to assemble this thing. I’m planning to use wire-wrap construction, even though I have no experience with it, since it seems like that’s what everyone else does. I found some used wire wrap tools and boards on eBay, and I’ll try to pick up something cheap. I’m not sure yet what I’ll mount the board inside. Maybe an old PC case, or a vanilla plastic project case, or a wooden box. It needs to be something to which I can mount some LED displays, switches, and buttons, with a little bit of homebrew bling, even if it doesn’t look like the bridge of the Enterprise.
Read 1 comment and join the conversation